CCA Independent Study:
“Seashell-Inspired Robotic Fabrication”
“Seashell-Inspired Robotic Fabrication”
Academic Project - Fall 2023
Professor: Dr. Negar Kalantar
Individual Project
Software and Tools:
Rhino · Grasshopper · 3D Printing · Laser Cutting · G-Code Programming
ABB Robot · Robots Plugin · HAL Robotics · RobotStudio
Rhino · Grasshopper · 3D Printing · Laser Cutting · G-Code Programming
ABB Robot · Robots Plugin · HAL Robotics · RobotStudio
"Parametric Biomimicry" explores the fascinating geometry of spiral seashells, translating these natural forms into intricate 3D models through advanced computational design and robotic fabrication techniques. This research, conducted under the supervision of Professor Negar Kalantar at Autodesk Technology Center (Pier 9), bridges the gap between digital and physical realms, utilizing the natural layering processes of mollusks to push the boundaries of architectural design and 3D printing.
Research Journey:
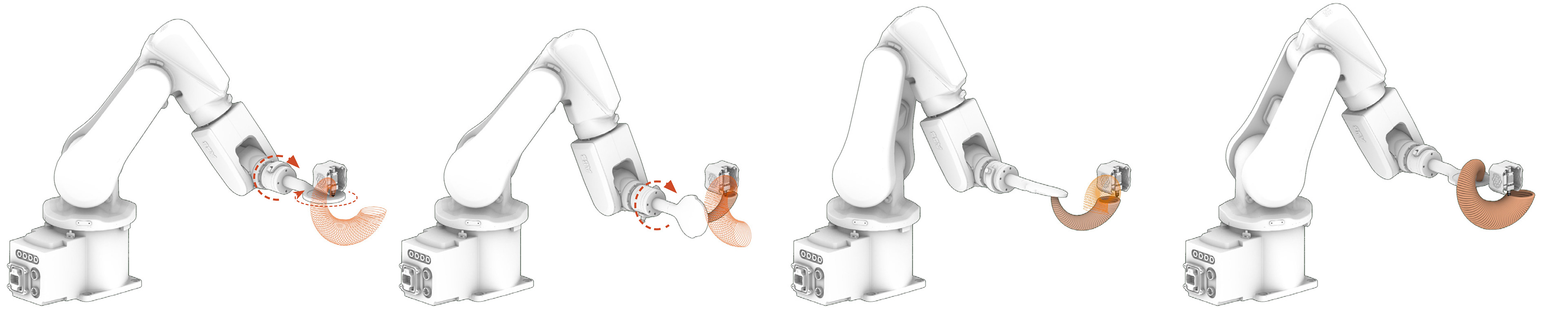
1.Exploring Seashell Geometry:
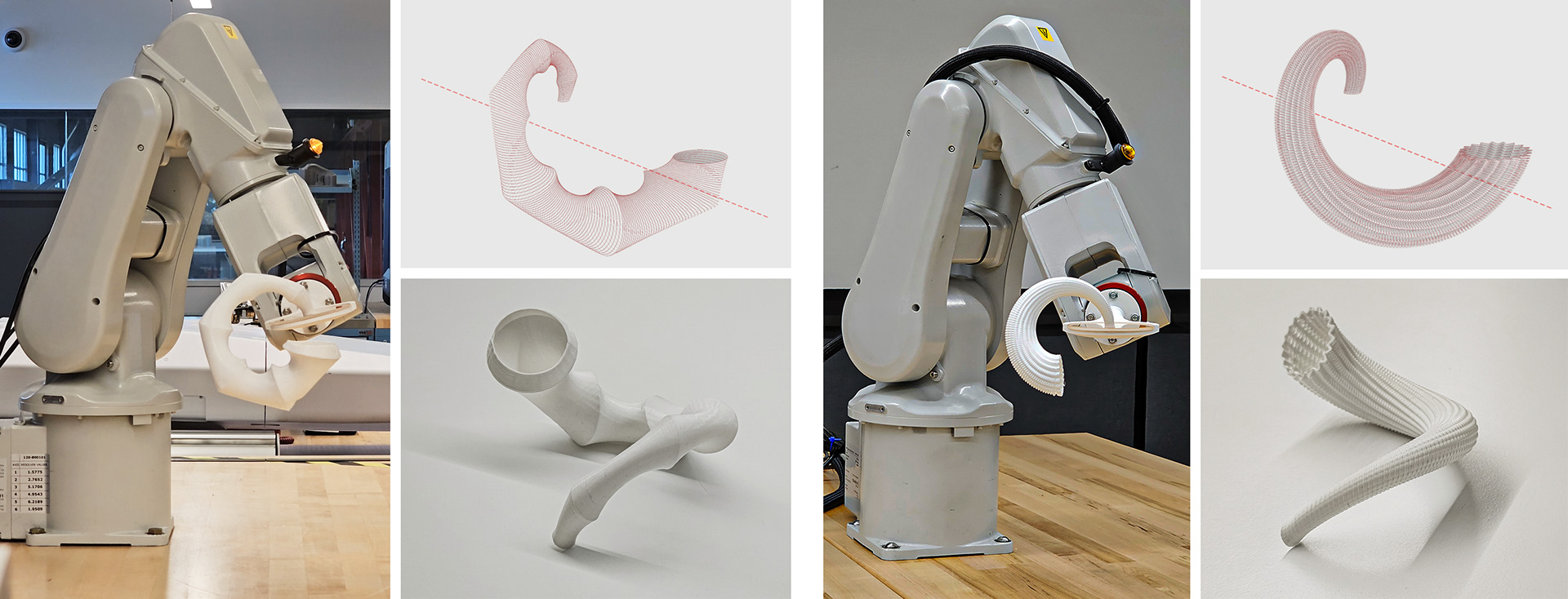
The project began with an in-depth study of the intricate geometry of spiral seashells. Using computational design tools in Grasshopper, I developed detailed 3D models that captured the complexity and elegance of these natural forms.
The project began with an in-depth study of the intricate geometry of spiral seashells. Using computational design tools in Grasshopper, I developed detailed 3D models that captured the complexity and elegance of these natural forms.
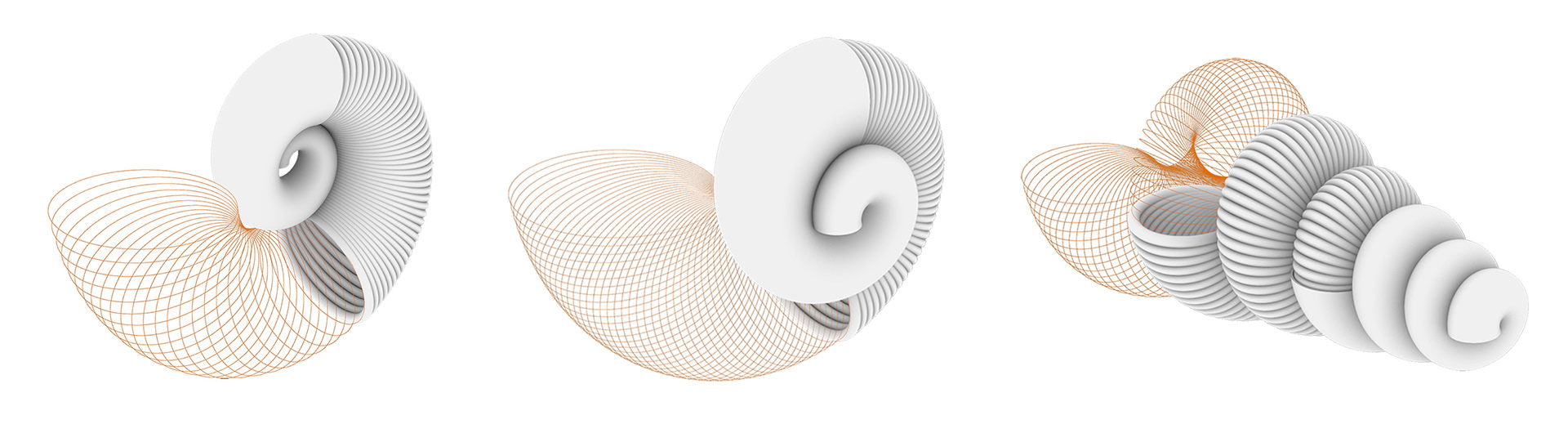
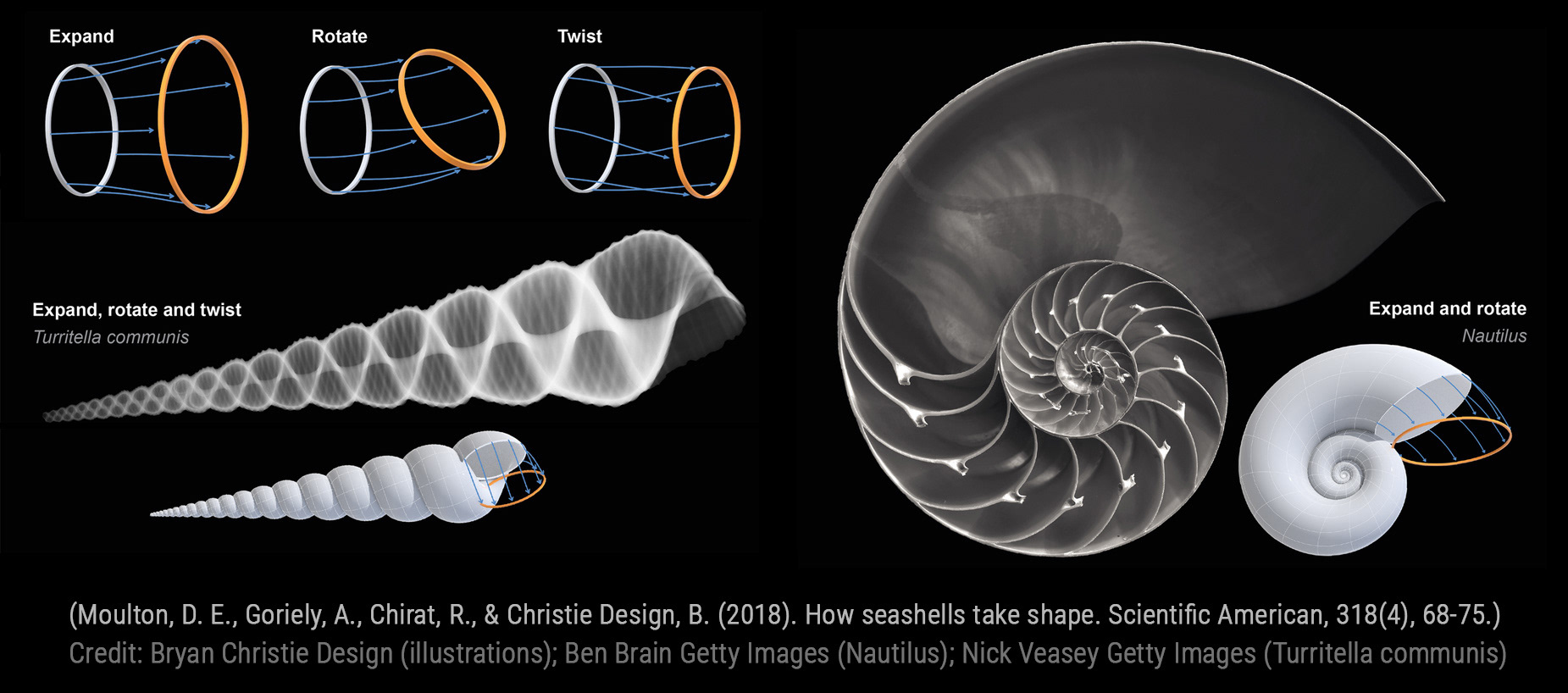
The business of building the shell falls to the mollusk's mantle. This thin, soft organ secretes layer on layer of a substance rich in calcium carbonate at the opening, or aperture, of the shell. It only needs to follow three basic rules to form the characteristic spiral seen in the shells of snails and their relatives, the gastropods. (Moulton, D. E., Goriely, A., Chirat, R., & Christie Design, B. (2018). How seashells take shape. Scientific American, 318(4), 68-75.)
Expand:
By uniformly depositing more material than it did on the previous pass, the mollusk creates a slightly larger opening at each iteration.
Expand:
By uniformly depositing more material than it did on the previous pass, the mollusk creates a slightly larger opening at each iteration.
Rotate:
By depositing slightly more material on one side of the aperture, the mollusk achieves a full rotation of that aperture, building a doughnut shape, or torus, from an initial circle
By depositing slightly more material on one side of the aperture, the mollusk achieves a full rotation of that aperture, building a doughnut shape, or torus, from an initial circle
Twist:
The mollusk rotates the points of deposition. by adding this step, the result is what mathematicians describe as a nonplanar, helicospiral shell.
The mollusk rotates the points of deposition. by adding this step, the result is what mathematicians describe as a nonplanar, helicospiral shell.
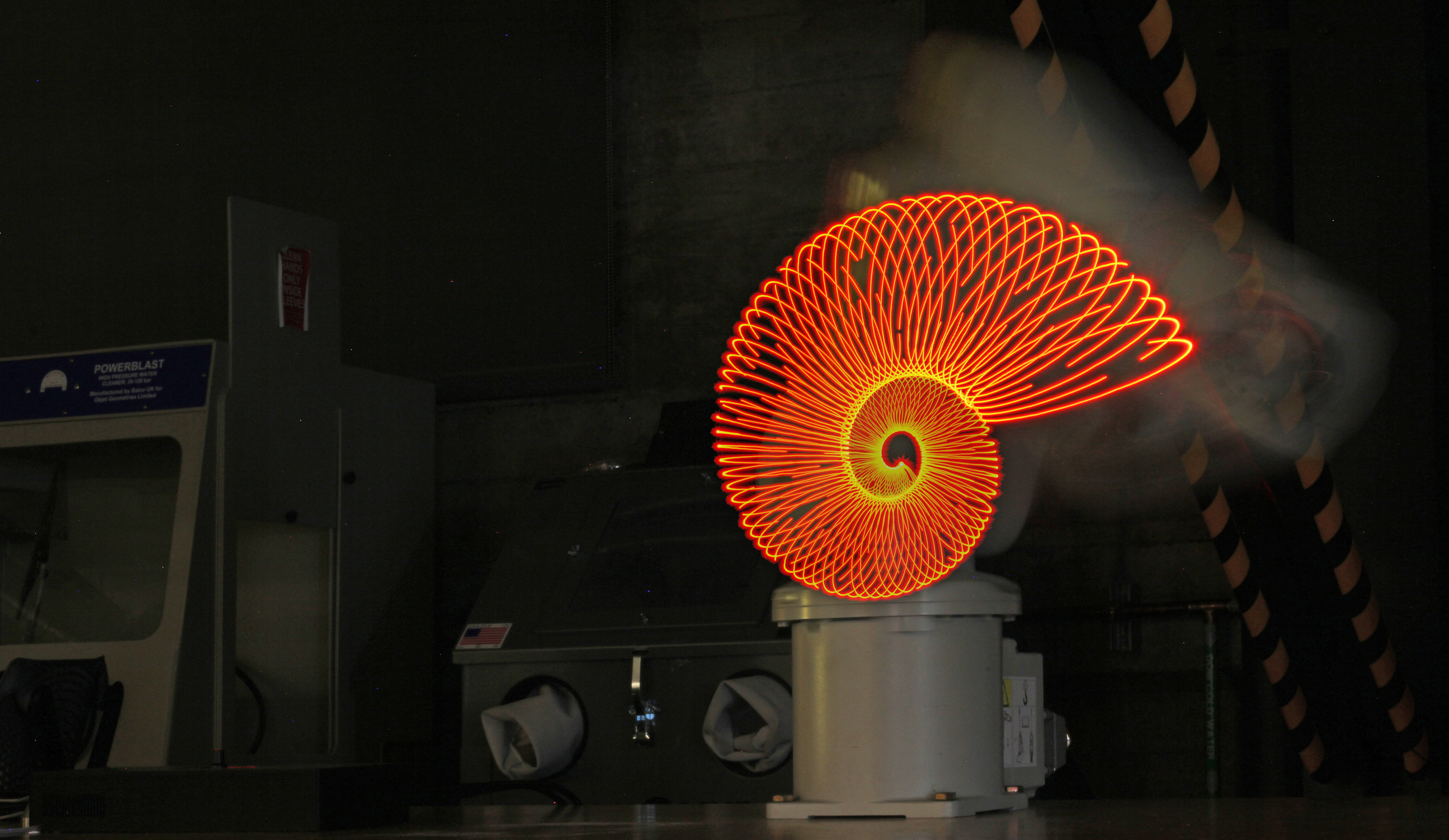
2.Robotic Light Visualization:
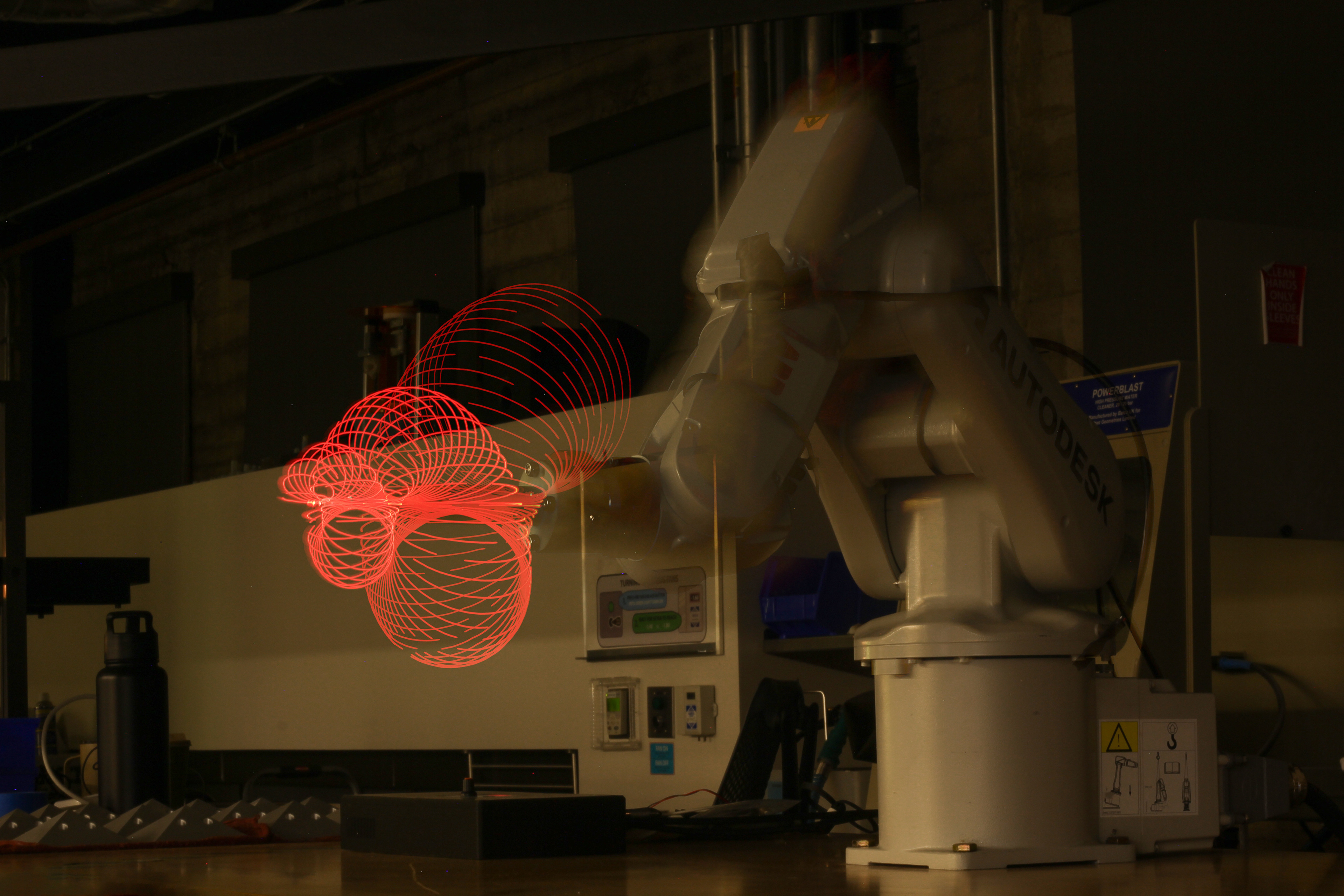
To enhance the precision and visual impact of the fabrication process, I designed a compact LED spotlight tool mounted on the robot's head. This tool traced the robot's movements through space, and long-exposure photography captured the resulting luminous patterns, creating a mesmerizing "ghost" of the robot's trajectory.
To enhance the precision and visual impact of the fabrication process, I designed a compact LED spotlight tool mounted on the robot's head. This tool traced the robot's movements through space, and long-exposure photography captured the resulting luminous patterns, creating a mesmerizing "ghost" of the robot's trajectory.
The role of different parameters such as twist, expansion rate, division, and turns, and how the effect of twist changes the luminous seashell.
3.Collaborative Robotic 3D Printing:
Two strategies were considered for 3D printing:
- Attaching the extruder to the robotic arm
- Keeping the extruder fixed while moving the bed with the robotic arm.
Two strategies were considered for 3D printing:
- Attaching the extruder to the robotic arm
- Keeping the extruder fixed while moving the bed with the robotic arm.
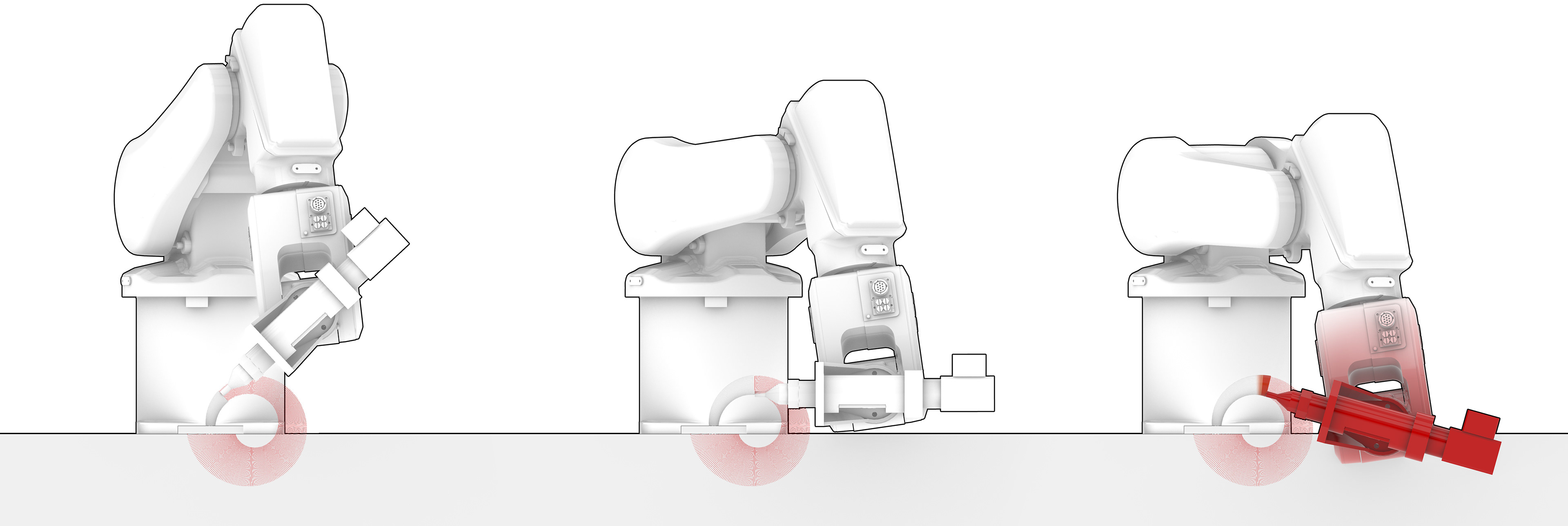
The fixed extruder and moving bed method was chosen, allowing for precise material deposition and reducing collision risks. This setup enabled scaffold-free printing of complex spiral geometries, showcasing the potential for faster, more efficient production through continuous material deposition without support structures.
Academic Collaboration and Presentation:
This project was carried out in collaboration with Professor Negar Kalantar at Autodesk Technology Center (Pier 9) and was presented to the Autodesk and CCA communities.
I also had the opportunity to discuss the research with Dr. Alain Goriely, Mathematician from Oxford University, whose research paper laid the foundation of this project.

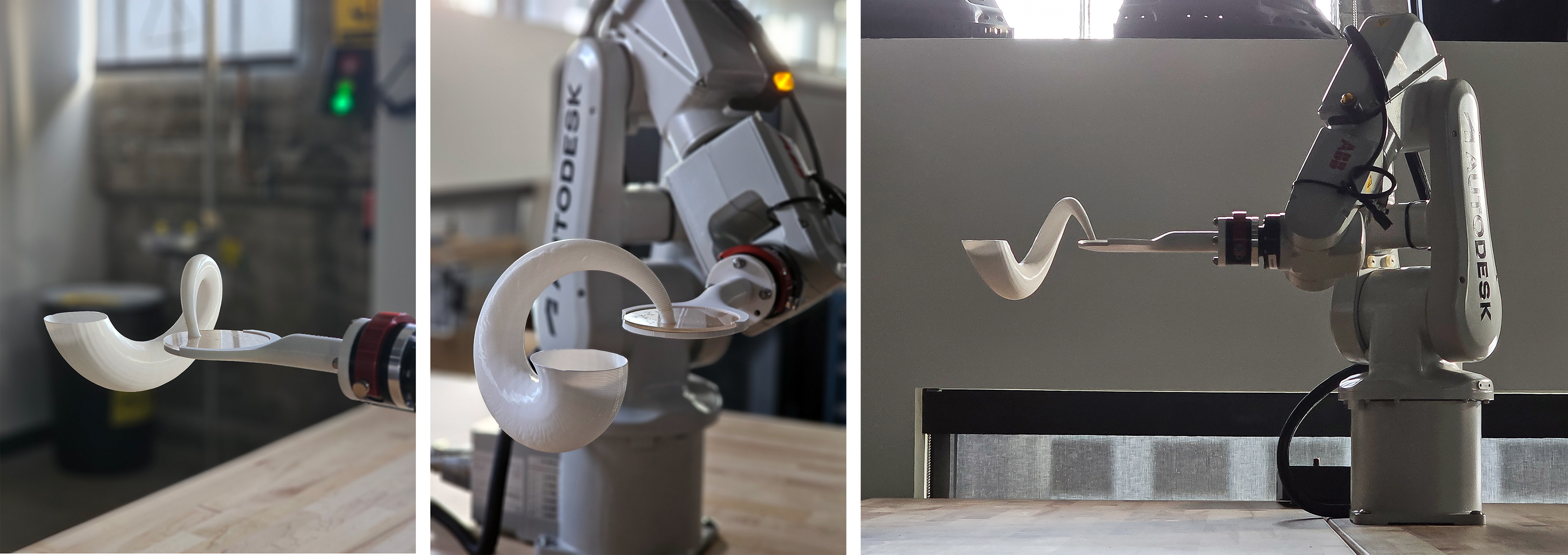
Final 3D printed models:

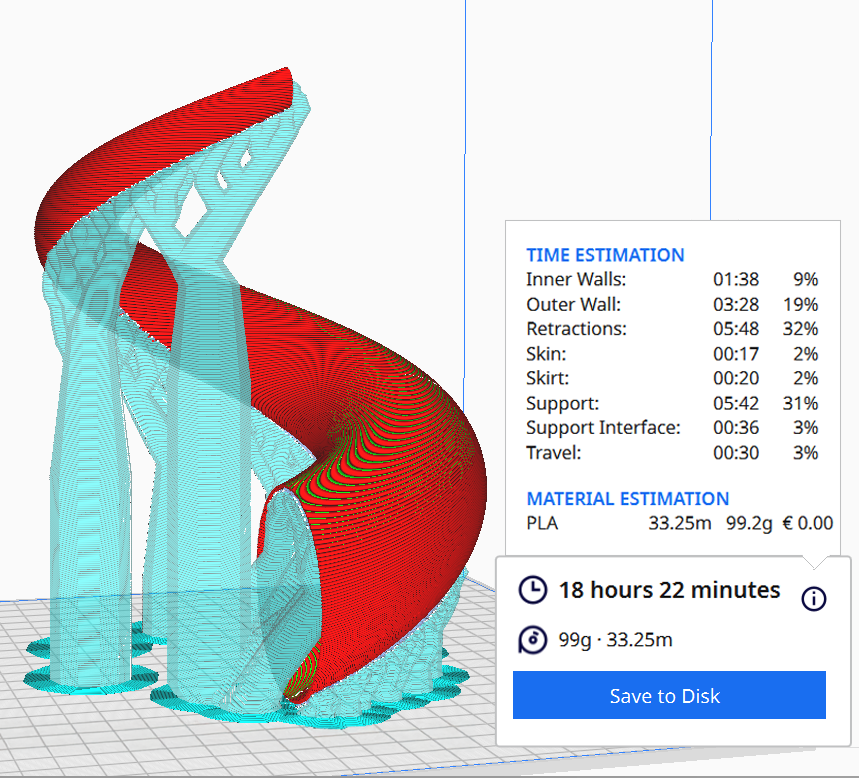
The study demonstrated major efficiency gains in both printing time and material usage. The robotic printing method produced the structure in approximately one hour using just 35 g of filament, compared to 19 hours and 99 g on an Ender 3 V2 Neo. While a Bambu Lab X1C reduced print time to 4 hours, high-speed settings caused instability and misprints. Notably, the robotic approach eliminated supports, retractions, and travel moves, which accounted for 12 hours of the Ender 3 V2 Neo’s total print time.

Exploring rhythms and textures in printing with a robot arm to mimic seashell shapes: